The well-known Serial Bus (aka Serial “IEC” Bus) of the Commodore 64 that connects to disk drives such as the 1541 is just one variant of a whole family of busses and protocols used by the line of 8 bit Commodore machines from the PET to the C65. This is the first article of a multi-part series on the Commodore Peripheral Bus family.
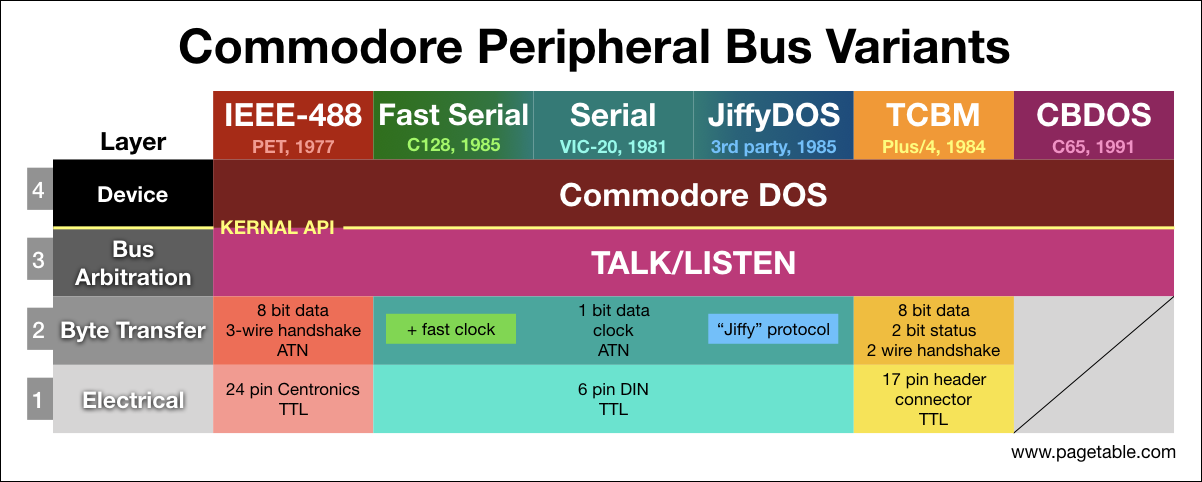
The following figure compares the different protocol stacks. There are three different connectors with their unique byte transfer protocols: IEEE-488, Serial, and TCBM. Fast Serial and JiffyDOS are optimized, but backwards-compatible protocols for existing cables, and CBDOS integrates the drive directly into the computer. The higher level protocols are the same across all Commodore 8 bit machines, including the “KERNAL” operating system APIs.
These are the properties and tradeoffs of the different variants of the protocol stack1:
| IEEE-488 | Serial | Fast Serial | JiffyDOS | TCBM | CBDOS | |
|---|---|---|---|---|---|---|
| Data Wires | 13 | 3 | 4 | 3 | 12 | – |
| Speed (KB/sec) | 2.1 | 0.4 | 2.1 | 2.1 | 2.4 | ∞ |
| Controller Code (bytes) | 334 | 434 | 708 | 739 | 262 | 0 |
| Comments | compatible with industry standard | very slow | requires decidated bit shifting hardware | point-to-point | drive integrated into computer |
All variants are based on the IEEE-488 standard and therefore share (mostly) the same basic architecture:
* All participants are daisy-chained.
* One dedicated controller (the computer) does bus arbitration of up to 31 devices.
* One-to-many: Any participant can send data to any set of participants.
* A device has multiple channels for different functions.
* Data transmission is byte stream based.
The different variants and layers will be described in multiple articles.
NOTE: I am releasing one part every week, at which time links will be added to the bullet points below. The articles will also be announced on my Twitter account @pagetable and my Mastodon account @pagetable@mastodon.social.
- Part 0: Overview and Introduction
That’s this part. - Part 1: IEEE-488 [PET/CBM Series; 1977]
This part covers layers 1 (electrical) and 2 (byte transfer) of IEEE-488, an 8-bit parallel bus with three handshake lines, an ATN line for bus arbitration and very relaxed timing requirements. - Part 2: The TALK/LISTEN Layer
This part talks about layer 3 (TALK/LISTEN), which is shared between all bus variants. - Part 3: The Commodore DOS Layer
This part describes layer 4 (Commodore DOS), which is shared between all bus variants. - Part 4: Standard Serial (IEC) [VIC-20, C64; 1981]
The VIC-20 introduced a serial version of layers 1 and 2 with one clock and one data line for serial data transmission, and an ATN line for bus arbitration. It has some strict timing requirements. This bus is supported by all members of the home computer line: VIC-20, C64, Plus/4 Series, C128 and C65. - Part 5: TCBM [C16, C116, Plus/4; 1984]
The Plus/4 Series introduced a 1-to-1 bus between the computer and one drive, with 8 bit parallel data, two handshake lines, and two status lines from the drive to the computer. It was the short-lived planned successor of the Standard Serial bus, but was then replaced by Fast Serial. - Part 6: JiffyDOS [1985] (coming soon)
JiffyDOS, a 3rd party ROM patch for computers and drives, replaces layer 2 byte transmission of Standard Serial by using the clock and data lines in a more efficient way. Bus arbitration is unchanged. The controller detects a device’s JiffyDOS support and can fall back to the Standard Serial protocol. - Part 7: Fast Serial [C128; 1986] (coming soon)
The C128 introduced Fast Serial, which replaces layer 2 byte transmission of Standard Serial by using a previously unused wire in the Serial connector as a third line for data transmission. Bus arbitration is unchanged. The controller detects a device’s Fast Serial support and can fall back to the Standard Serial protocol. - Part 8: CBDOS [C65; 1991] (coming soon)
The unreleased C65 added CBDOS (“computer-based DOS”) by integrating one or more drive controllers into the computer. There are no layers 1 and 2, and layer 3 sits directly on top of function calls that call into the DOS code running on the same CPU.
This article series is an Open Source project. Corrections, clarifications and additions are highly appreciated. I will regularly update the articles from the repository at https://github.com/mist64/cbmbus_doc.
-
The speeds have been measured by repeatedly reading the status channel of a disk drive. IEEE-488, Serial and JiffyDOS were measured on a 1 MHz C64 and Fast Serial on a C128, which executes all (Fast) Serial code in 1 MHz mode. TCBM was measured on a 1.77 MHz Plus/4 with the screen on, which makes the effective CPU speed similar to the C64. This is the code: a9 00 20 bd ff a9 01 a2 08 a0 0f 20 ba ff 20 c0 ff a9 08 20 b4 ff a9 6f 20 96 ff a2 00 20 a5 ff 9d 00 04 e8 d0 f7 60. Both Fast Serial and JiffyDOS can reach higher speeds in the special case of loading files using custom protocols. Controller code size was measured on CBM2 for IEEE-488, on C64 for Serial and JiffyDOS, and on C128 for Fast Serial. Code sizes are approximate and do not include the LOAD and SAVE code.↩
Talk about great timing! (No pun intended.) I’m planning a project that communicates over the C64’s serial bus. I am glad to have found the start of your series. I’m looking forward to the follow-up posts.
Thank you for the work you’ve put into researching and documenting these articles so far! However, the weekly schedule for updates on this series seems to have been derailed; are you still planning on completing this series? I’m particularly interested in parts 4, 5, and 7!
Yes.
https://www.pagetable.com/?p=1135
Jeg valgte JuridiskBistand og det er jeg glad for.
Hi Michael,
Excelent work, it is a jewel, Thank you very much.
Any ETA on when the JiffyDOS article will be posted? There’s no clear description available and I’m looking forward to your in-depth analysis.